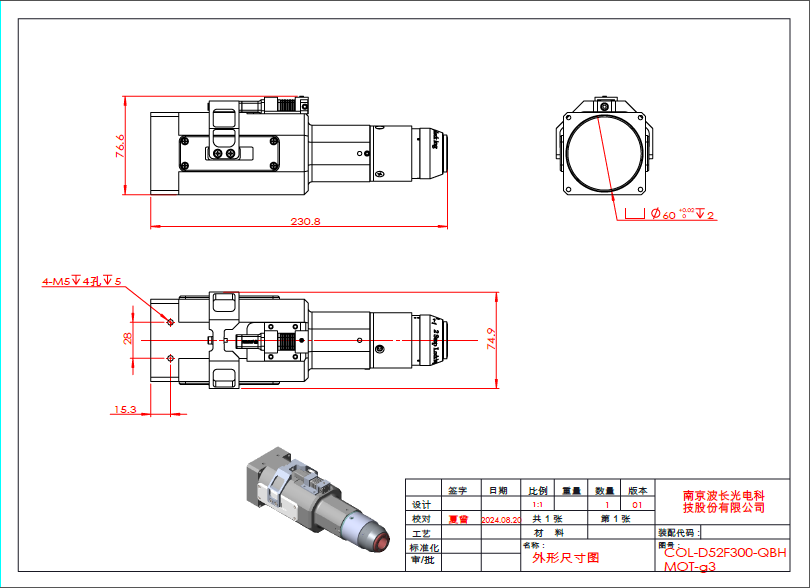
เครื่องวัดความโค้งอิเล็กทรอนิกส์แบบใช้มอเตอร์ COL-D52F300-QBH-MOT






เครื่องวัดความโค้งอิเล็กทรอนิกส์แบบใช้มอเตอร์ COL-D52F300-QBH-MOT
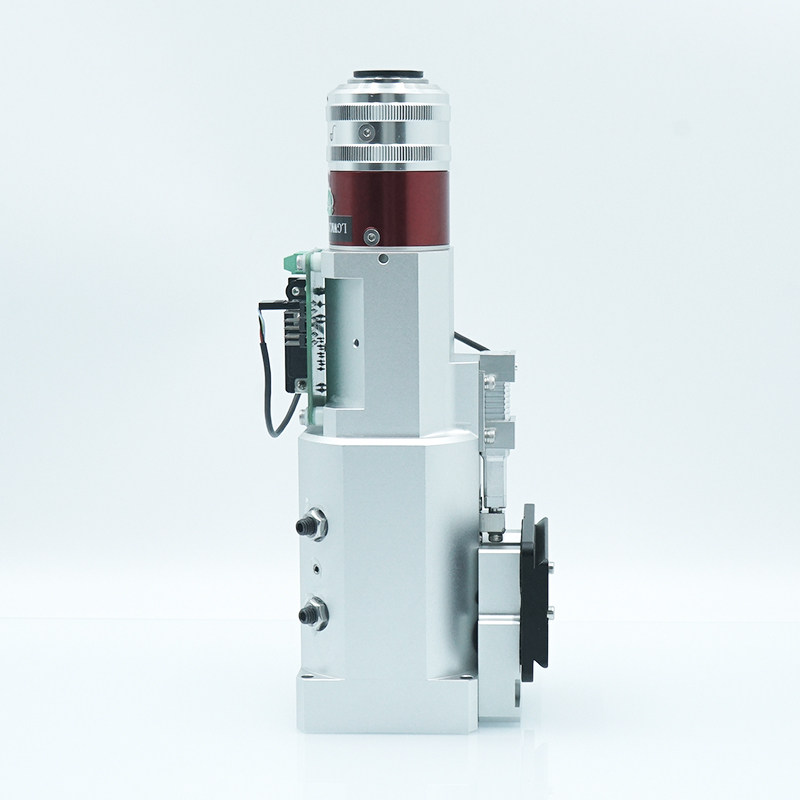
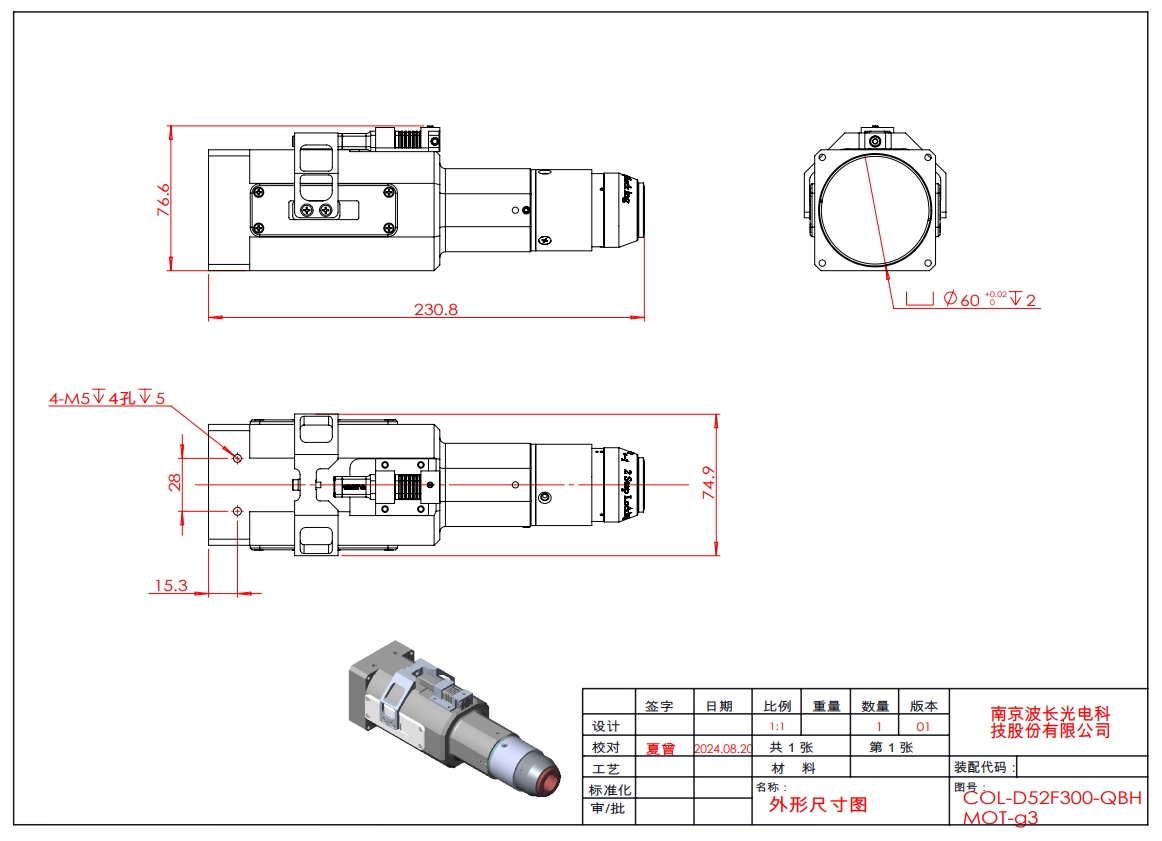
เครื่องวัดความโค้งอิเล็กทรอนิกส์แบบใช้มอเตอร์
หลักการทำงานของเครื่องปรับลำแสงเลเซอร์คือการรวมลำแสงที่กระจายออกให้แคบลงผ่านเลนส์ที่มีความยาวโฟกัสเป็นบวกหนึ่งตัวหรือหลายตัว เพื่อให้ลำแสงขนานกับแกนแสง ตัวอย่างเช่น หากลำแสงที่ปล่อยออกมาจากปลายของเลเซอร์ไฟเบอร์มีขนาดเล็กและกระจายออกเป็นมุมไม่กี่องศา เครื่องปรับลำแสงสามารถปรับลำแสงให้เป็นลำแสงที่มีเส้นผ่านศูนย์กลางใหญ่ขึ้น แต่มีมุมการกระจายตัวที่เล็กมาก





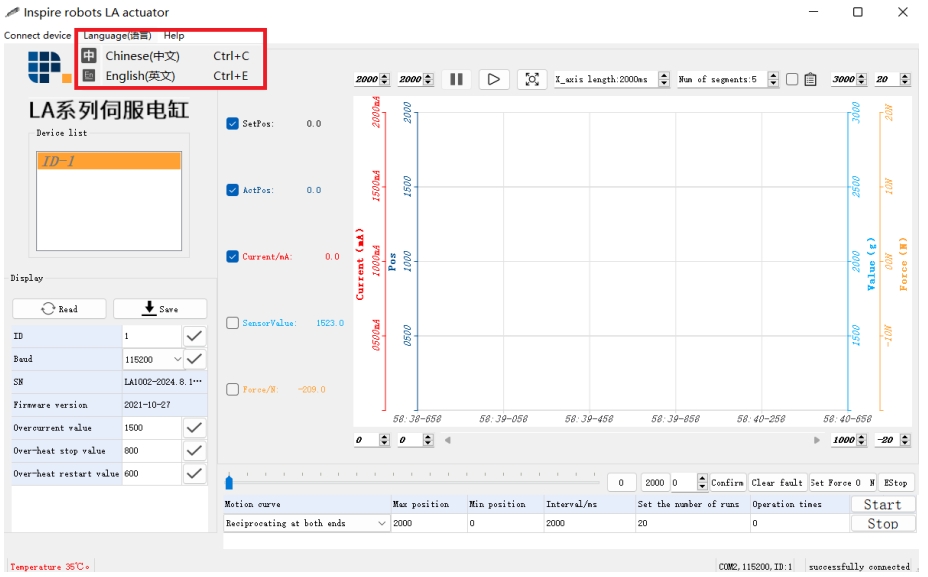
คู่มือการใช้งานซอฟต์แวร์มอเตอร์ D52-F300
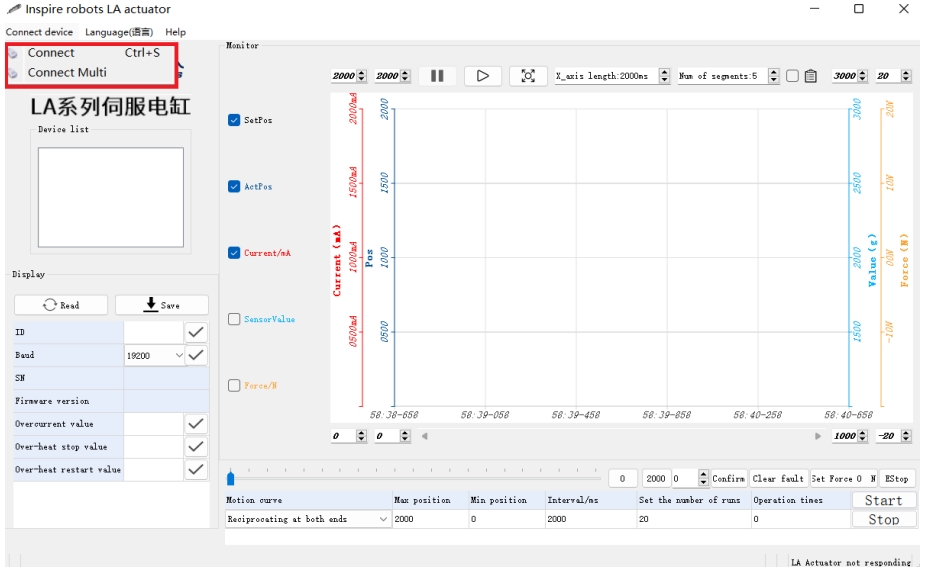
1. อุปกรณ์ที่เชื่อมต่อ:
เมนู 'ค้นหาอุปกรณ์' -> เลือกพอร์ตอนุกรม, อัตรา Baud, ช่วง ID หรือค่าเริ่มต้นอัตโนมัติ -> คลิกค้นหา หลังจากค้นหาแอคทูเอเตอร์สำเร็จแล้ว ข้อมูลจะได้รับการอัปเดตในหน้าต่างกราฟแสดงข้อมูลและแถบสถานะที่ด้านล่างของหน้าต่างหลัก
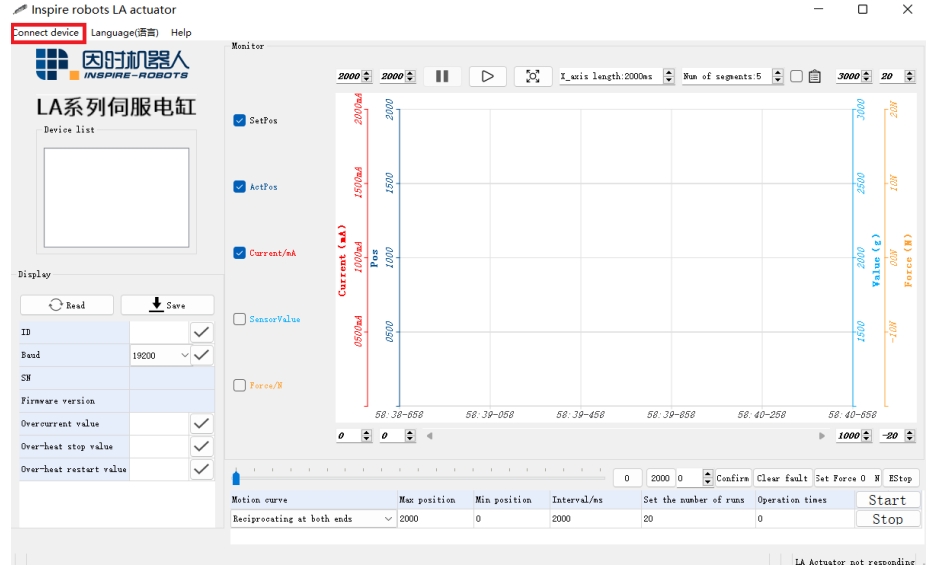
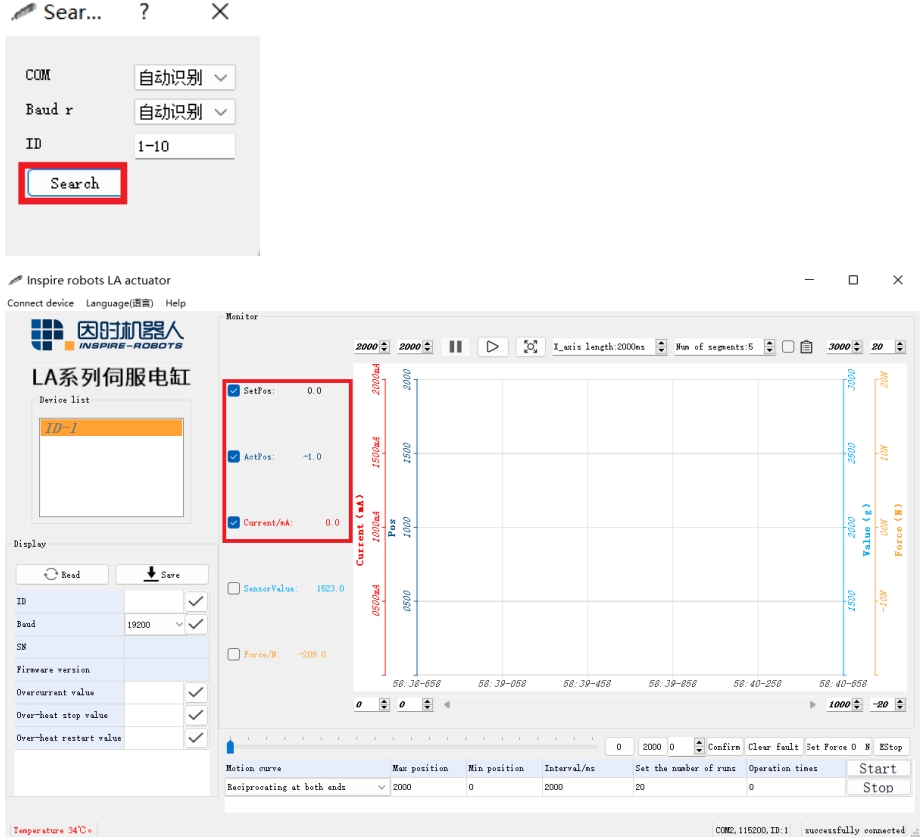
2. การตรวจสอบข้อมูลสถานะ:
หลังจากเชื่อมต่อแอคทูเอเตอร์แล้ว กราฟข้อมูลจะแสดงข้อมูลสถานะแบบเรียลไทม์ เช่น ตำแหน่ง กระแส และค่าที่ยอมรับได้ (ระบบ LAF, LASF) ของแอคทูเอเตอร์ แถบสถานะด้านล่างจะแสดงข้อมูล เช่น อุณหภูมิของแอคทูเอเตอร์ ข้อผิดพลาด และสถานะการเชื่อมต่อ
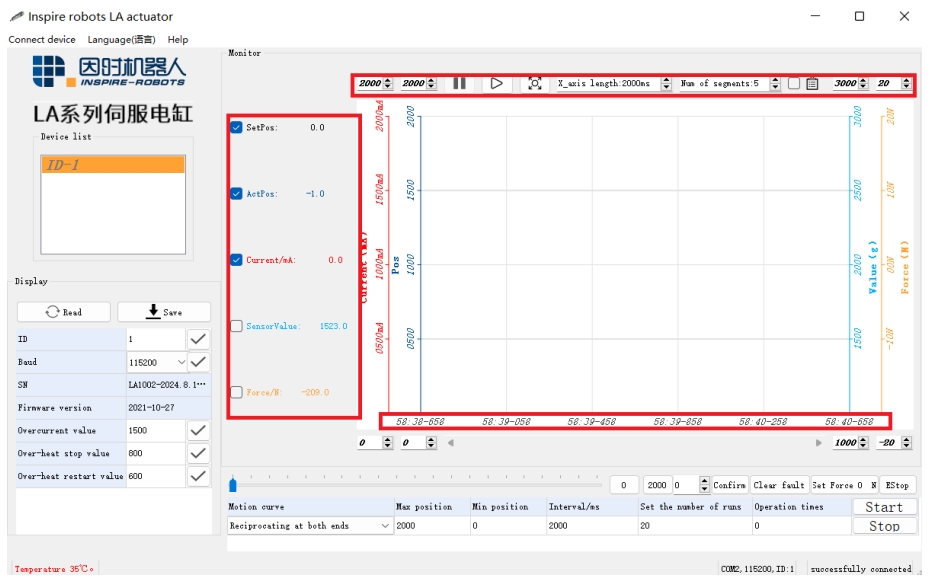
การแสดงผลตัวเลขของข้อมูล 5 อันดับแรกบนกราฟ และช่องทำเครื่องหมายสำหรับเลือกว่าจะแสดงเส้นโค้งหรือไม่
เหนือกราฟจะมีปุ่มสี่ปุ่มสำหรับหยุดชั่วคราว ดำเนินการต่อ ล้าง และคืนค่าช่วงการแสดงผลของเส้นโค้งแบบเรียลไทม์ การลาก: กดปุ่มเมาส์ขวาค้างไว้เพื่อลากเส้นโค้งในกราฟ
การซูม: กดปุ่มเมาส์ซ้ายค้างไว้เพื่อเลือกพื้นที่ที่ต้องการขยายในกราฟ คลิกปุ่ม 'คืนค่าช่วงแกนพิกัด' ช่วงการแสดงผลจะกลับสู่ปกติ
การตั้งค่าช่วงข้อมูลแกน: สามารถตั้งค่าช่วงข้อมูลของแต่ละแกนได้ผ่านช่องข้อความด้านบนและด้านล่างของแกนข้อมูล
การลากแกนเวลา: เมื่อกราฟข้อมูลหยุดชั่วคราว คุณสามารถลากแถบเลื่อนด้านล่างไทม์ไลน์เพื่อลากไทม์ไลน์ได้
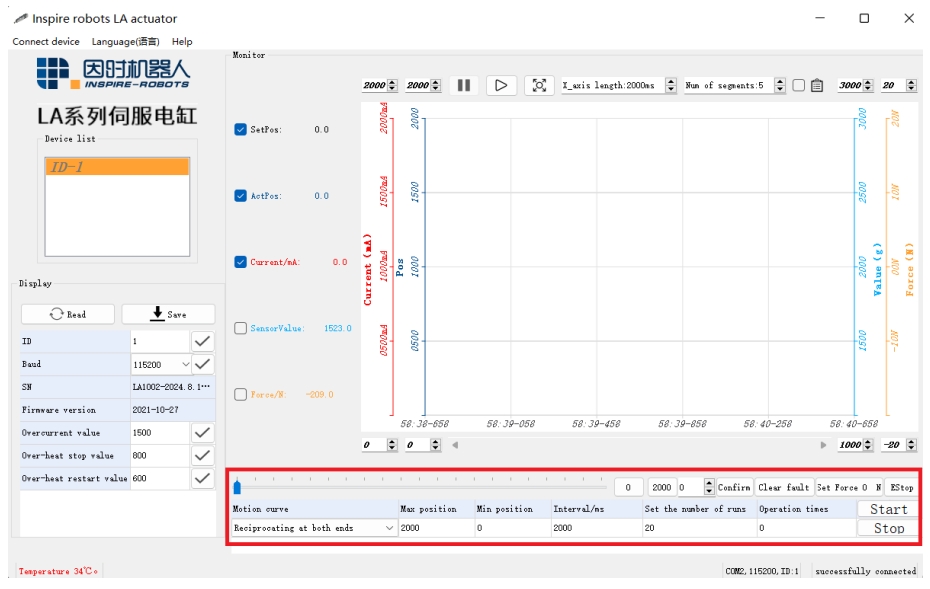
3. ควบคุมการเคลื่อนไหว:
3.1 การลากแถบเลื่อนหรือการตั้งค่ากล่องข้อความทางด้านขวาของแถบเลื่อนสามารถควบคุมตำแหน่งของก้านดันที่ถูกขับเคลื่อนได้
3.2 ตารางด้านล่างตัวเลื่อนตำแหน่งสามารถใช้เพื่อตั้งค่าการเคลื่อนที่แบบไปกลับเป็นคาบของแอคทูเอเตอร์ได้
3.2.1 หลังจากเลือกรูปแบบการเคลื่อนที่แบบไปกลับและตั้งค่าพารามิเตอร์ที่เกี่ยวข้องแล้ว ระบบขับเคลื่อนจะทำการเคลื่อนที่แบบไปกลับด้วยความเร็วสูงสุด
3.2.2 หลังจากเลือกคลื่นสามเหลี่ยมหรือคลื่นไซน์ และตั้งค่าพารามิเตอร์ที่เกี่ยวข้องแล้ว ประเภทการขับเคลื่อนจะเคลื่อนที่ตามรูปคลื่นที่ตั้งไว้
3.3 ปุ่มสองปุ่มทางด้านขวาของตัวเลื่อนตำแหน่งสามารถส่งคำสั่งล้างข้อผิดพลาดและคำสั่งหยุดฉุกเฉินไปยังตัวกระตุ้นได้
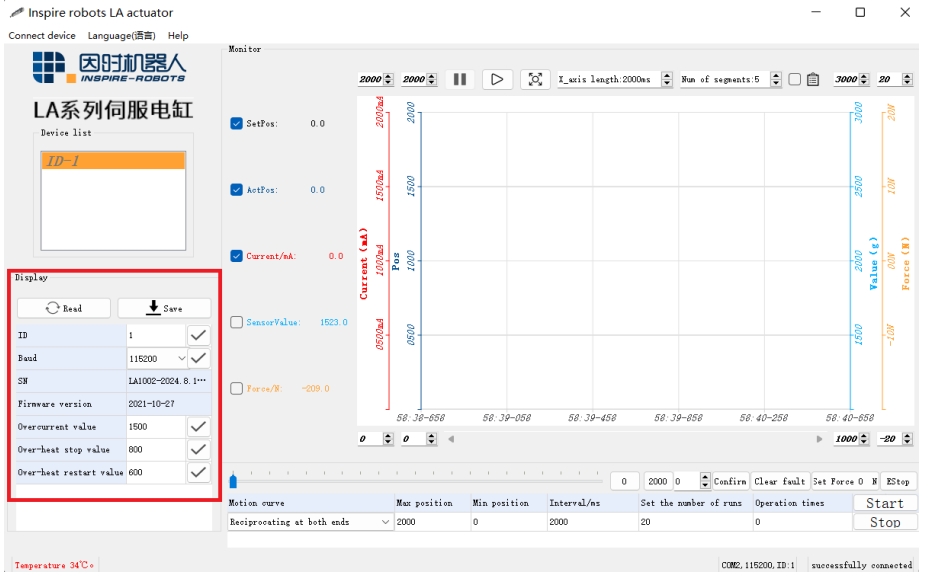
4. การตั้งค่าพารามิเตอร์
4.1 หลังจากคลิก 'อ่านพารามิเตอร์' ซอฟต์แวร์จะแสดงพารามิเตอร์ภายในของไดรฟ์ในรูปแบบตาราง
4.2 รหัสตัวกระตุ้น (Actuator ID) ช่วง 1-254
4.2 อัตรา Baud ของพอร์ตอนุกรม ซึ่งจะมีผลหลังจากบันทึกแล้ว
4.3 ค่าการป้องกันกระแสเกิน โดยมีช่วงตั้งแต่ 300-500 มิลลิแอมป์
4.4 ค่าการป้องกันอุณหภูมิสูงเกิน อยู่ในช่วง 200 ถึง 800
4.5 ค่าเริ่มต้นของการคืนอุณหภูมิ ซึ่งอยู่ในช่วง 200 ถึง 600 ควรสังเกตว่าค่าการป้องกันอุณหภูมิสูงเกินต้องสูงกว่าค่าเริ่มต้นของการคืนอุณหภูมิ 50 มิฉะนั้นพารามิเตอร์จะไม่ถูกต้อง
4.6 การแก้ไขค่าพารามิเตอร์ใดๆ จำเป็นต้องบันทึกไว้ มิเช่นนั้น การแก้ไขจะล้มเหลวหลังจากปิดเครื่องและเริ่มต้นใหม่ที่ฝั่งตรงข้าม
5. การสลับภาษาจีนและภาษาอังกฤษ
เมนู “ภาษา” -> เลือก “ภาษาจีน” หรือ “ภาษาอังกฤษ”
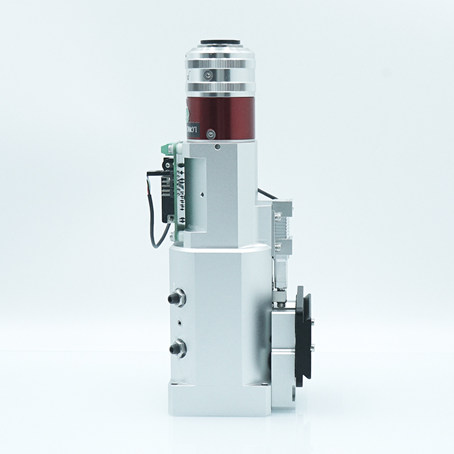
เครื่องปรับลำแสงอิเล็กทรอนิกส์นี้สามารถปรับลำแสงเลเซอร์ใยแก้วนำแสงได้อย่างแม่นยำ และใช้งานได้อย่างมีประสิทธิภาพในระยะไกล เป็นแบบมือถือ สะดวกต่อการใช้งานกลางแจ้ง หัวปรับลำแสงไฟฟ้าความแม่นยำสูง สามารถเล็งเป้าหมายได้อย่างรวดเร็ว ในขณะเดียวกัน เครื่องปรับลำแสงนี้ส่วนใหญ่ใช้สำหรับการกำจัดสิ่งกีดขวาง และเหมาะสำหรับเลเซอร์ที่มีกำลังไม่เกิน 2000 วัตต์ และค่า NA ไม่เกิน 0.065 ช่วงความยาวคลื่นของเลเซอร์อยู่ที่ประมาณ 1064 นาโนเมตร
เครื่องวัดความโค้งอิเล็กทรอนิกส์แบบใช้มอเตอร์
เครื่องปรับลำแสงอิเล็กทรอนิกส์นี้สามารถปรับลำแสงเลเซอร์ใยแก้วนำแสงได้อย่างแม่นยำ และใช้งานได้อย่างมีประสิทธิภาพในระยะไกล เป็นแบบพกพา สะดวกต่อการใช้งานกลางแจ้ง หัวอิเล็กทรอนิกส์ความแม่นยำสูง เล็งเป้าหมายได้อย่างรวดเร็ว ในขณะเดียวกันตัวปรับลำแสงนี้ใช้สำหรับกำจัดสิ่งกีดขวางเป็นหลัก และเหมาะสำหรับกำลังเลเซอร์ไม่เกิน 2000 วัตต์ และค่า NA ของเลเซอร์ไม่เกิน 0.065 ช่วงความถี่ของเลเซอร์อยู่ที่ประมาณ 1064 นาโนเมตร




หมวดหมู่สินค้า
บริษัท Wavelength มุ่งเน้นการจัดหาผลิตภัณฑ์ด้านทัศนศาสตร์ที่มีความแม่นยำสูงมาเป็นเวลา 20 ปีแล้ว
